|
|
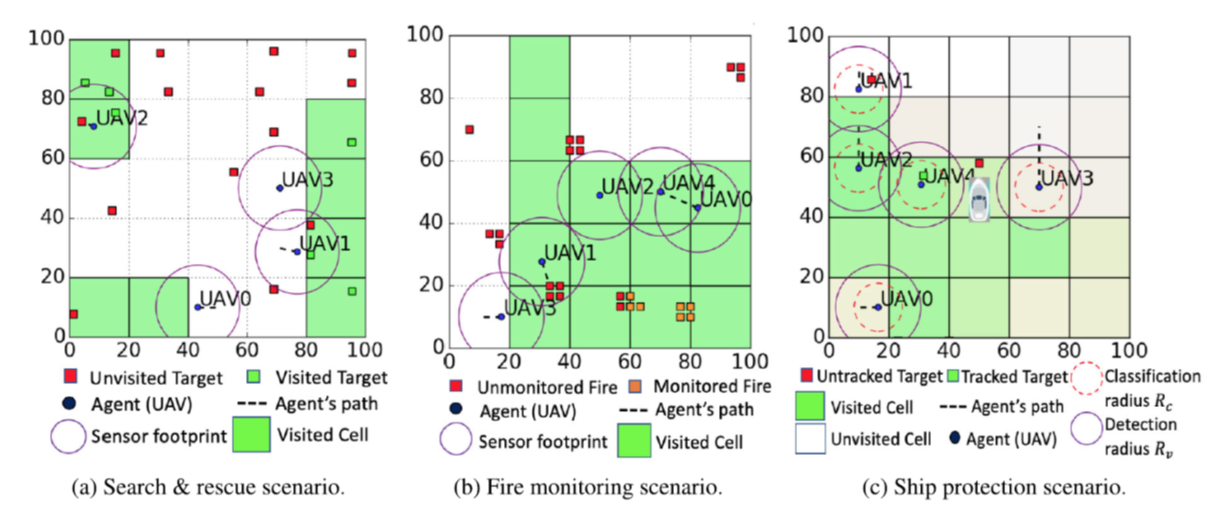
Metareasoning for Robots and Autonomous SystemsThis page contains the following sections: Principal InvestigatorBackgroundRobots and autonomous systems have limited computational resources, often due to size, weight, and power (SWaP) constraints, and these resources must perform the reasoning and computation tasks for sensor management, image processing, mapping, planning, control, collaboration, and communications. In this dynamic environment, as the robot executes different reasoning tasks that compete for resources, the constraints on processors, memory, communication bandwidth, and power can interact in unpredictable ways to degrade the robot's performance. Metareasoning, a branch of artificial intelligence (AI), is reasoning about reasoning. An intelligent robot can use metareasoning to improve its reasoning and decision-making processes by adapting them in response to changes in the environment or the system, which makes it more resilient as well. This webpage describes research by my group that has developed and evaluated metareasoning approaches for various scenarios and systems. Book: Herrmann, Jeffrey W., Metareasoning for Robots: Adapting in Dynamic and Uncertain Environments, Springer Nature, 2023. Metareasoning ApproachesPlanning and Metareasoning for Multi-Agent Systems with Variable Communication AvailabilityIn this research project, we first evaluated the performance of different collaboration algorithms for decentralized task allocation in scenarios with different communication availability. In these scenarios, the agents in the multi-agent system (swarm) needed to find and then visit numerous targets in the region of interest. We then constructed metareasoning policies that the agents used to switch to a different task allocation when communication availability changed. This project was funded by the Air Force Research Laboratory. For more information, see the project web page.
Figure caption: Possible runs of agents performing decentralized TA for each type of scenario considered in our problem formulation. Each target has a unique ID, not shown in these figures to reduce clutter. In the ship protection scenario, lighter shades of green reflect that a longer time has passed since cells were last searched. Image: Carrillo et al., 2021. Collaborators and students: Shapour Azarm, Michael W. Otte, Mumu Xu. Tekevwe Akoroda, Akshay Bapat, Estefany Carrillo, Mohamed Khalid M Jaffar Sharan Nayak, Ruchir Patel, Eliot Rudnick-Cohen, Suyash Yeotikar. Related Publications
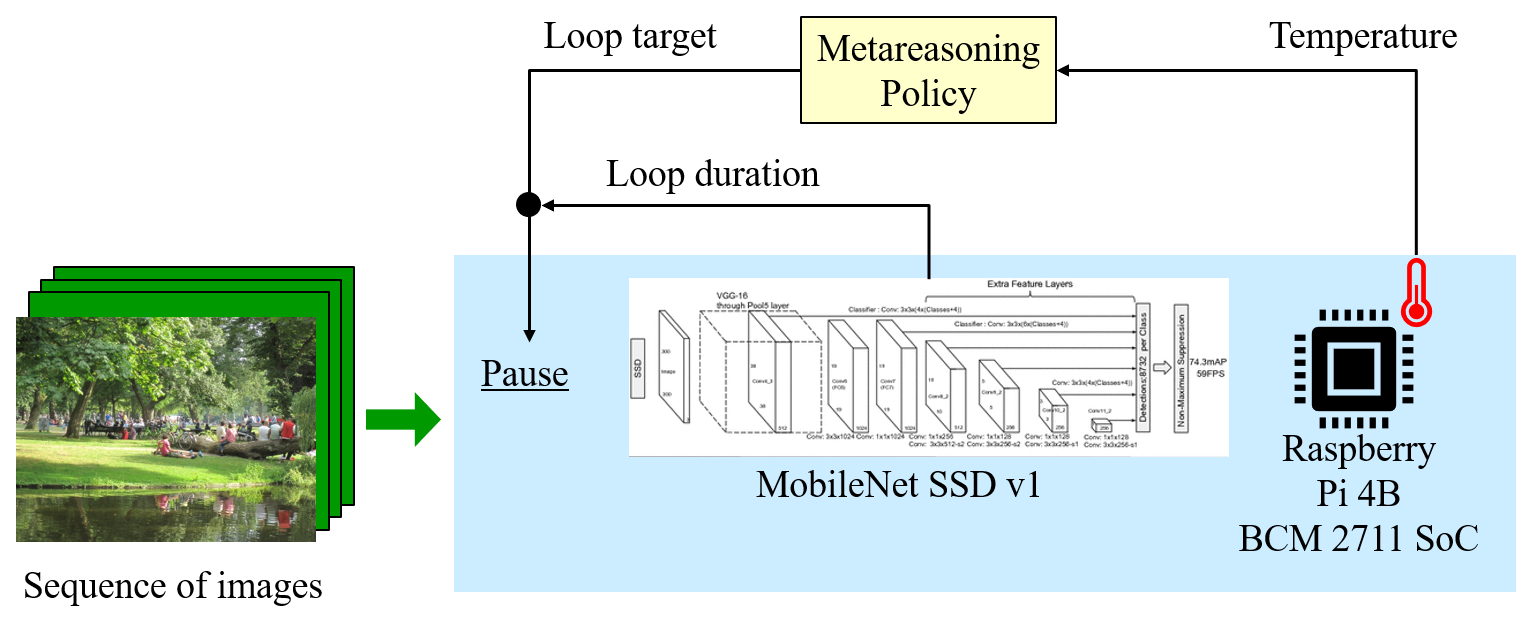
Metareasoning for Thermal ManagementThis project conducted a study that evaluated how well metareasoning can manage a Raspberry Pi 4B's central processing unit (CPU) temperature while it is performing image processing (object detection and classification) on the Common Objects in Context (COCO) dataset. We developed and tested two metareasoning approaches: the first maintains constant image throughput, and the second maintains constant expected detection accuracy. The first approach switched between the InceptionV2 and MobileNetV2 image classification networks with a Single Shot Multibox Detector (SSD) attached. The second approach was tested on each network for a range of parameter values. The study also considered cases that used the system's built-in throttling method to control the temperature. Both metareasoning approaches were able to stabilize the device temperature without relying on throttling. Michael Dawson conducted this study, which was funded by the Army Research Laboratory as part of the ArtIAMAS cooperative agreement.
Figure caption: Metareasoning can modify how quickly an image processing algorithm operates to avoid excessive temperature. SSD image: Liu et al., ECCV 2016. Related Publications
Using Metareasoning on a Mobile Ground Robot to Recover from Path Planning FailuresAutonomous mobile ground robots use global and local path planners to determine the routes that they should follow to achieve mission goals while avoiding obstacles. Although many path planners have been developed, no single one is best for all situations. This paper describes metareasoning approaches that enable a robot to select a new path planning algorithm when the current planning algorithm cannot find a feasible solution. We implemented the approaches within a ROS-based autonomy stack and conducted simulation experiments to evaluate their performance in multiple scenarios. The results show that these metareasoning approaches reduce the frequency of failures and reduce the time required to complete the mission. Sidney Molnar, Matt Mueller, Robert Macpherson, and Lawrence Rhoads conducted this study, which was funded by the Army Research Laboratory as part of the ArtIAMAS cooperative agreement. Related Publications
Figure caption: Simulated robot stuck behind a cluster of trees, where its planner is unable to create a feasible path. Image: Sidney Molnar. Data-driven Metareasoning for Collaborative Autonomous SystemsWhen coordinating their actions to accomplish a mission, the agents in a multi-agent system may use a collaboration algorithm to determine which agent performs which task. This paper describes a novel data-driven metareasoning approach that generates a metareasoning policy that the agents can use whenever they must collaborate to assign tasks. This metareasoning approach collects data about the performance of the algorithms at many decision points and uses this data to train a set of surrogate models that can estimate the expected performance of different algorithms. This yields a metareasoning policy that, based on the current state of the system, estimated the algorithms’ expected performance and chose the best one. For a ship protection scenario, computational results show that one version of the metareasoning policy performed as well as the best component algorithm but required less computational effort. The proposed data-driven metareasoning approach could be a promising tool for developing policies to control multi-agent autonomous systems. This study was conducted during my sabbatical at the Naval Air Warfare Center-Aircraft Division (NAWC-AD) in 2018. I would like to thank Stephen Kracinovich, Johann Soto, and their colleagues at NAWC-AD for the financial support and the resources used in this research.
|
Last updated on May 15, 2023, by Jeffrey W. Herrmann.