A Low-Power Horizon Detection Chip
(Note: Because the project's
writeup has not been published yet, I am only providing a limited
information about the project)

Unmanned micro-aerial vehicles are rapidly
being developed for use as a low-cost, portable, aerial surveillance platform
for semi-autonomous operation. While they
are successfully achieving flight, the sensors needed for autonomous flight (in
contrast to long-range navigation) are lacking.
Obstacle avoidance and flight stability remain a problem for such small
vehicles with tiny weight and power budgets.
Their small size makes them susceptible to tiny wind gusts, making the
speed of processing critical for stability.
While many visual motion approaches to stabilizing aerial
vehicles with low-power chips are being pursued (e.g. [1, 2]), detection of the horizon is
also desirable for high-altitude pitch and roll stabilization. Several low sensor-count horizon sensing
systems have been developed for assisting aircraft pilots that utilize contrast
in the infrared spectrum [3] or visible light [4]. In recent years, a team from the University
of Florida (UF) has demonstrated an automatic visual-horizon finding algorithm
operating on a high-speed computer on the ground that receives a transmitted color
video-feed from the airplane [5]. We have devised a similar algorithm that uses
an optimization approach embedded in an analog VLSI vision chip to find the best
visual horizon and provide a measure of confidence. The VLSI implementation has the potential for
real-time, low-power performance and operation over a wider dynamic range of
image intensities.
In this work, we have designed and tested a low-power, real-time visual
horizon sensor for use in stabilizing miniature aircraft with respect to pitch
and roll in moderate-to-high altitude flight.
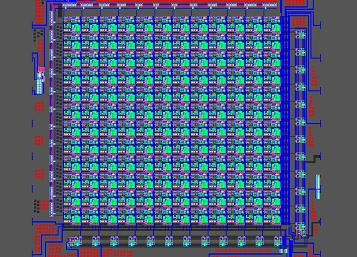
This sensor currently incorporates a 12x12 photoreceptor array (above) and finds a
best-fit horizon line based on image intensity.
The sensor includes a “confidence-level” output for a flight control
system to detect poor sensing conditions.
The chip was fabricated in a commercially-available 0.5mm CMOS process and operates on less than 2.5
milliwatts with a 5V power supply.
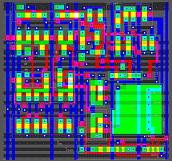
Each pixel of the 12x12 array
contains a photoreceptor (green square in the bottom right corner),
circuits that compute whether the pixel is a 'sky', or 'ground' pixel,
circuits that compute the average image intensity in each class,
circuits that decide whether the pixel is misclassified, and circuits
that compete globally to change the horizon vector.
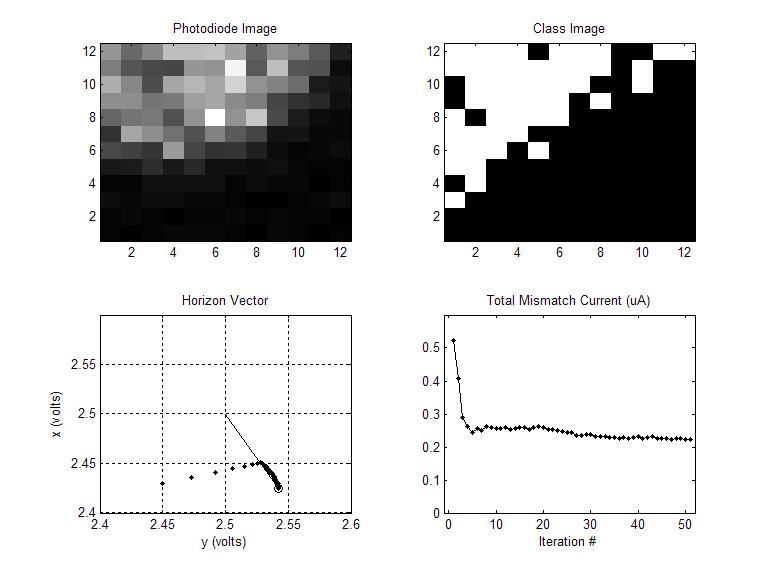
(click on figure to see detail) In the example to the left, an image consisting primarily of two
intensity regions (bright and dark) is projected onto the chip
surface. A global horizon vector is computed by the chip and each
pixel can thus reports its classification into sky or ground (top-right
panel of the figure). The binary image shown is the final
result.
The bottom-left panel of the figure to the left is the endpoint of the
horizon vector (which is normal to the horizon line) as it changes over
time. The line leading from the center of the image is the final
vector solution.
Each each step, the total number of pixels that consider themselves to
be misclassified as sky or ground is added and reported. This can
be taken as a measure of confidence of the horizon result (low numbers
means high confidence.). For perfectly linear horizons,
this number could potentially reach as low as zero, but for more
realistic images, even an excellent estimate for the horizon will not
be able to fit a line to make all pixels "happy".
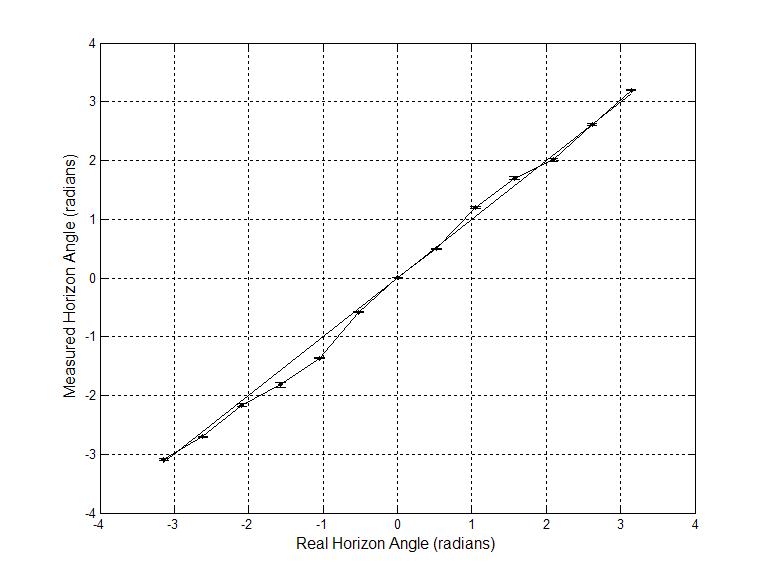 (Click on figure to see detail) We
also measured the accuracy of the horizon measurement by projecting a
calibrated horizon image onto the chip and interpreting the chip's
output voltages (without correction) as a horizon angle.
(Click on figure to see detail) We
also measured the accuracy of the horizon measurement by projecting a
calibrated horizon image onto the chip and interpreting the chip's
output voltages (without correction) as a horizon angle.
References
[1] T. Netter and N. Franceschini, "Towards
UAV Nap-of-the-Earth flight using optical flow," Advances in Artificial Life, Proceedings, vol. 1674, pp. 334-338,
1999.
[2] W. E.
Green, P. Y. Oh, K. Sevcik, and G. L. Barrows, "Autonomous Landing for
Indoor Flying Robots Using Optic Flow," presented at ASME Intl Mech. Engr.
Congress, Washington D.C., 2003.
[3] B.
Taylor, C. Bil, and S. Watkins, "Horizon Sensing Attitude Stabilization: A
VMC Autopilot," presented at 18th Intl. UAV Systems Conference, Bristol,
UK, 2003.
[4] Futaba,
"Futaba(R) PA-2: Pilot Assist Link Auto Pilot System," (http://www.futaba-rc.com/radioaccys/futm0999.html),
2004.
[5] S. M.
Ettinger, M. C. Nechyba, P. G. Ifju, and M. Waszak, "Vision-guided flight
stability and control for micro air vehicles," Advanced Robotics, vol. 17, pp. 617-640, 2003.